 | 陈挚 副研究员,硕导 联系方式:andychen183@shu.edu.cn |
l个人简介
陈挚,上海大学机自学院副研究员,上海市“青年东方英才”、上海市“超级博士后”人才计划获得者,中国仪器仪表学会嵌入式分会秘书长,前华为技术有限公司软件工程师,悉尼科技大学访问学者。长期从事无人系统的感知、决策、规划、建模与控制等领域的研究工作。其中包括舰载无人直升机的控制,陆空两用球形无人机在抗灾救援中的应用,微型无人机在少儿编程教育中的应用,AGV控制算法及其在仓储物流中的应用,飞行模拟器控制,多智能体集群控制等。主持完成了国家自然科学基金青年基金项目、国防重点实验室基金项目、中国博士后基金项目,作为主干参与陆航预研-总装备部某新构型无人直升机演示验证项目等国防领域科研项目5项。以第一作者/通讯作者身份发表EI/SCI收录的论文30余篇,授权国家发明专利4项。
l主要研究领域
1、无人系统的建模与控制
2、机器学习与人工智能
3、集群控制
l代表性成果
在《IEEE Transactions on Intelligent Vehicles》、《Transactions of the Institute of Measurement and Control》等国内外学术期刊发表SCI/EI论文30余篇、获授权发明专利4项,授权软件著作权3项。
▪ 论文
1、Chen Z., Gao K, Wang H, et al. Learning-based modeling and control design for a coaxial helicopter with aerodynamic coupling[J]. Transactions of the Institute of Measurement and Control, 2024: 01423312241231066. SCI
2、Chen Z., Lin X, Jiang W. Coaxial Helicopter Attitude Control System Design by Advanced Model Predictive Control under Disturbance[J]. Aerospace, 2024, 11(6): 486. SCI
3、Sun, H. T., Peng, C., Ge, X., & Chen, Z.* (2023). Secure event-triggered sliding control for path following of autonomous vehicles under sensor and actuator attacks. IEEE Transactions on Intelligent Vehicles, 9(1), 981-992. SCI
4、Chen, Z., Tu, X., Xing, L., Fu, J., & Rogelio, L. (2019). A Special kind of Sliding Mode Control for Nonlinear System with State Constraints. IEEE Access. SCI
5、Chen, Z., Tu, X., & Fu, J. (2019). Autonomous Trajectory Tracking Control for a Large-Scale Unmanned Helicopter under Airflow Influence. Mathematical Problems in Engineering. SCI
6、Chen, Z., Fu, J., Tu, X.,et al. (2019). Real-time predictive sliding mode control method for AGV with actuator delay. Advances in Manufacturing, 7(4), 448-459. SCI
7、Chen, Z., Wang, D. (2018). Modelling and hovering control for a coaxial unmanned helicopter using sliding mode. Aircraft Engineering and Aerospace Technology, 90(5), 815-827. SCI
8、Xing, L., Tu, X., Chen, Z.*. (2020). Foot-mounted pedestrian navigation method by comparing ADR and modified ZUPT based on MEMS IMU array. Sensors, 20(13), 3787. SCI
▪ 获奖
获上海市青年东方英才计划(创业组)(2024)、上海市“超级博士后”人才计划(2023)、上海市博士后创新创业大赛优胜奖(2023)
▪ 知识产权
1、陈挚, 高客, 李洋, 张进;一种共轴双旋翼直升机滑模控制方法,CN118131812A
2、陈挚, 林翔宇; 一种弹载型共轴式无人机,国家发明专利,202311564852.9.
3、陈挚,王道波,一种无人机在极端初始状态的快速平衡控制方法,国家发明专利,专利号:CN201710878502.8
4、屠晓伟,何伟康,陈挚,一种新构型全向共轴式无人机,国家发明专利,专利号:CN201910465814.5
▪ 成果展示

固定翼靶机&无人旋翼直升机
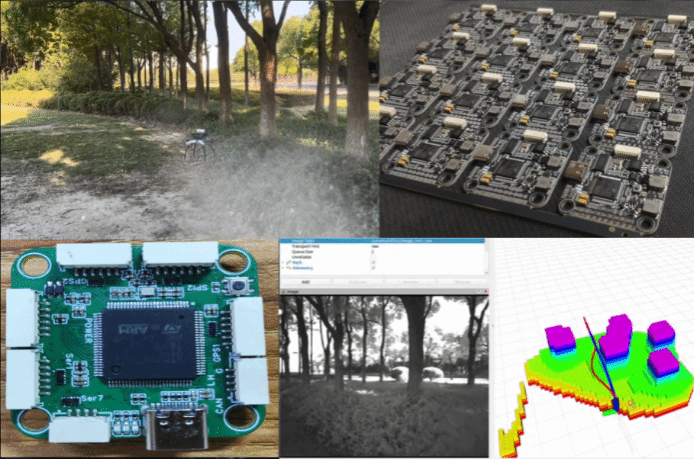
自研飞控系统及其在实时路径规划中的应用
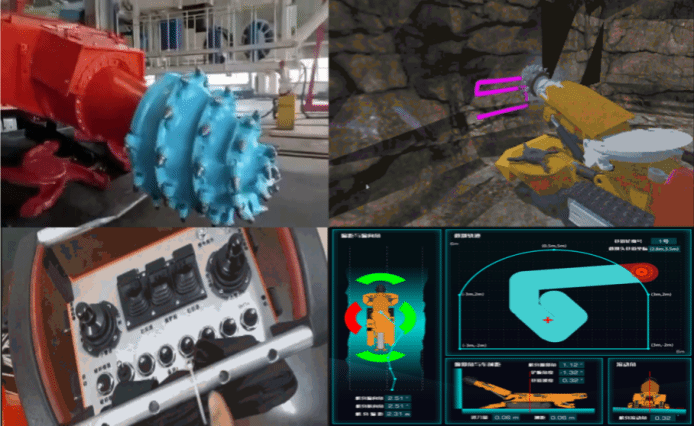
矿用掘进机智能控制系统与装备研发

中国研究生电子设计大赛二等奖
l科研项目
1、国家自然科学基金(青年项目),61903241,基于正不变集的滑模控制及其在新构型舰载无人直升机中的应用研究,2020.01-2022.12
2、中国博士后科学基金新冠肺炎疫情防控专项资助(特别资助),2020T130074ZX,陆空两用球形机器人在抗灾中的控制算法研究与样机试制,2020.05-2021.05
3、中国博士后科学基金(面上一等资助),2018M630424,新型舰载无人直升机的飞行控制算法研究与系统设计,2018.05-2020.05
4、横向项目,基于高性能指标的无人车给定速度控制算法开发,2018.5-2018.9
5、横向项目,智能化挖掘机自动作业控制算法开发,2023.5-2024.4
6、横向项目,矿用掘进机智能控制系统与装备研发,2025.2-2026.1
l国际合作
1、与悉尼科技大学、新加坡国立大学保持紧密合作。
2、悉尼科技大学大学访问教授(2024)、新加坡国立大学联合培养博士(2016)。

