近日,上海大学学术委员会公布了“第二届上海大学十大学术进展”评选结果,我院田应仲教授团队研究成果“柔性机器人与微纳操作”成功获评(网页链接:https://ac.shu.edu.cn/info/1010/2124.htm)。该评选活动于2022年8月10日正式启动,经过我校各学院学术分学术委员会申报、同行专家推荐等方式产生候选成果29项,经过学术委员会秘书处形式审查、全校师生公众投票、卓越校友投票和学术委员会委员投票等环节,评选出“第二届上海大学十大学术进展”10项,旨在挖掘和表彰我校各学科在过去一年取得的突出学术成果。

图1 “柔性机器人与微纳操作”研究团队(左起:张泉 李龙 田应仲 金滔)
柔性机器人与微纳操作是航空航天、通信设备等重大需求领域的核心技术,是制约设备检修及先进制造的卡脖子问题。课题组针对柔性机器人高柔顺末端刚度不足、自感知效果不佳等难题,发明了强动态干扰下智能感知与精密作业技术,实现多驱动协同刚度高效调节以及多模态信息融合自感知,变刚度效率提升90%,目标预测准确率达98.1%。
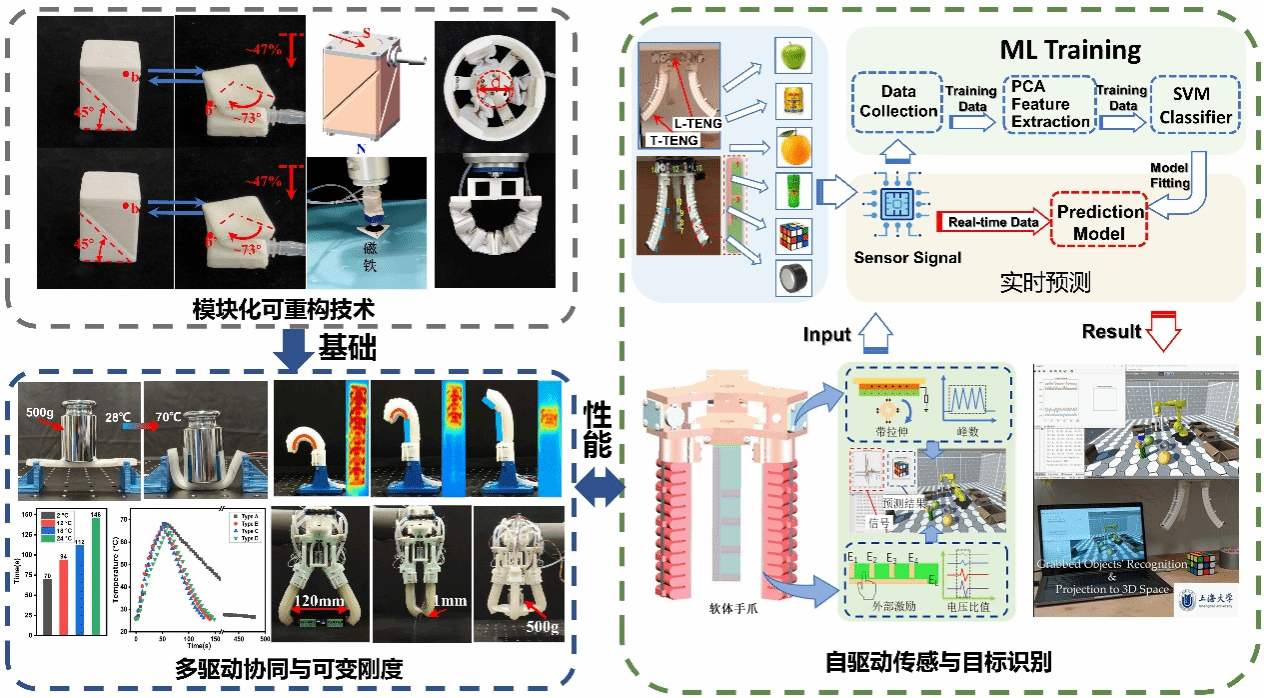
图2 强动态干扰下柔性机器人智能感知与精密作业技术
针对微纳操作精度难实现、传动行程难保证等挑战,提出多维大行程柔顺传动机构设计与精密平台动态迟滞补偿控制技术,实现0.19um和0.37urad直线/转角定位精度,使耦合位移误差减小4倍以上。
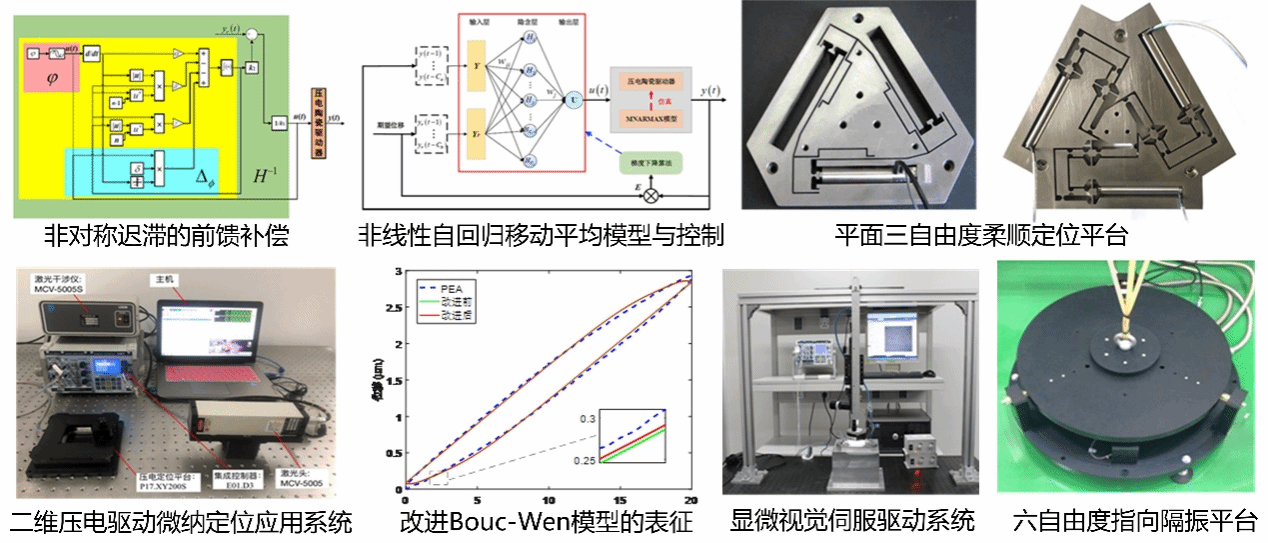
图3 高精度多维微纳定位及操控技术
项目研究成果引领国内外相关技术前沿,授权发明专利32项,发表包括Nature子刊在内的高水平论文36篇,服务相关企业产生经济效益累计达3亿元。

