2025年12月,机自学院上海市智能制造及机器人重点实验室王洁羽副教授、田应仲教授团队,以上海大学为第一完成单位在机构学顶级期刊 Mechanism and Machine Theory(MMT) 上发表了题为 “Bio-inspired multi-mode finger mechanism based on Miura-ori unit equivalent linkages” 的研究成果。我院王洁羽副教授为论文第一作者,上海理工大学赵胤君博士为论文通信作者。
机器人灵巧抓取与操作领域长期面临一个核心难题:如何在简化系统驱动与控制的同时,赋予机械手接近人手的适应性与灵活性。传统手指机构往往依赖复杂驱动或多自由度结构实现不同抓取姿态,难以在控制复杂度与功能多样性之间取得平衡。研究团队基于人手日常抓取与操作过程中手指的不同运动状态以及PFSFL机构的多模式运动特性及其同人手指间关节的运动等效性,提出了一种单自由度多模式创新手指机构设计。该研究将人手在日常抓握过程中手指常见的几种运动状态映射为特定的单自由度运动模式并设计了一种基于Miura折纸单元等效连杆机构(PFSFL, Plane-symmetric flat-deployable spherical linkage)的多模式手指机构,使其能够在单一驱动下通过在四种单自由度运动模式间进行切换以满足不同的任务需求,为开发具有增强灵活性、适应性和多任务能力的可重构夹持器/灵巧手提供新思路。
研究亮点
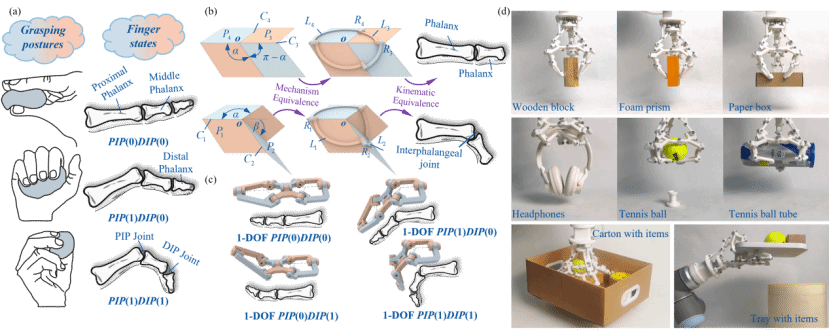
1. 揭示了PFSFL机构的多模式运动特性及其同人手指间关节的运动等效性;
2. 基于PFSFL机构耦合构建了具备四种单自由度运动模式的多模式手指机构,其每种运动模式对应人手日常抓取过程手指常见运动状态;
3. 基于多模式手指机构与Bricard连杆机构设计了一种单自由度多模式夹持器,并通过抓取实验初步验证了多模式手指机构在可重构夹持器设计方面的应用潜力。
原文链接:https://doi.org/10.1016/j.mechmachtheory.2025.106226

