上海大学机电工程与自动化学院自动化系本科生钟玉桥(学术导师:解杨敏、史航、杨雨生)在机械臂运动规划领域取得突破性进展,其研究成果《Safety-Guided RRT*: Hyperoctant Sampling-based Path Planning with SDF-based Robotic Representation》被机器人领域国际顶会IROS 2025录用。国际智能机器人与系统会议(IROS)是机器人领域两大顶级会议之一,入选论文代表全球机器人技术前沿水平。2025年会议将汇集全球3000余名学者,展示人工智能与机器人交叉领域的最新突破。

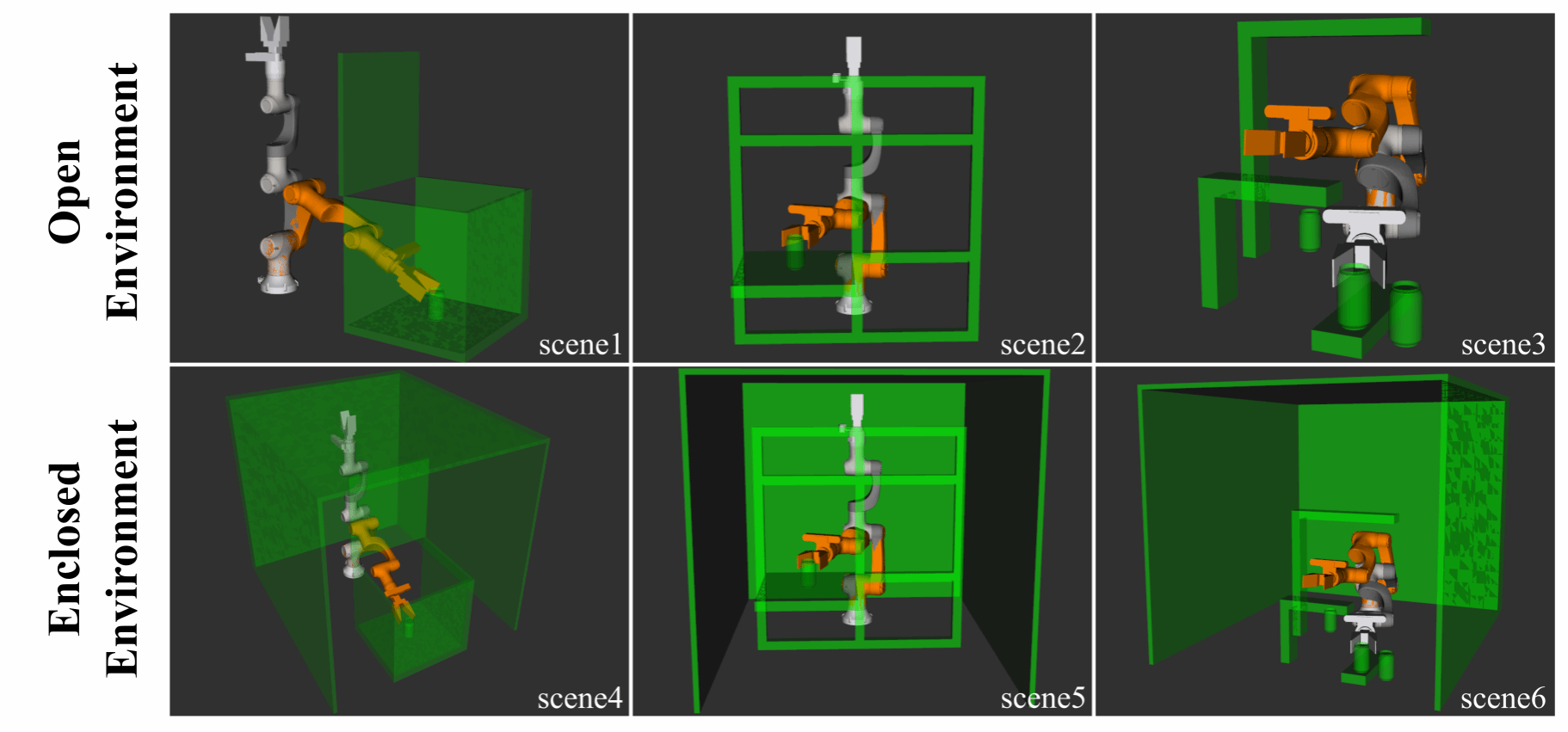
该研究的技术突破让机械臂更“聪明”地避障。研究团队创新提出安全引导型RRT算法(SG-RRT),通过三大核心技术解决技术应用痛点:首次将符号距离函数(SDF)引入采样过程,实现碰撞风险的精确量化;超八面体采样策略动态引导搜索方向,提升狭窄空间通过率;在保证100%避障前提下,使规划轨迹与障碍物平均间距提升47%。实验研究证明,该算法在复杂工业场景中的规划成功率较传统方法提高60%以上,相关技术可应用于智能制造、医疗机器人等高安全要求领域。
钟玉桥同学为机自学院自动化系本科生,曾获学业一等奖学金、上海大学招生宣传大使等荣誉,这一成果的发表体现了上海大学机自学院在人才培养方面所取得的最新成效。
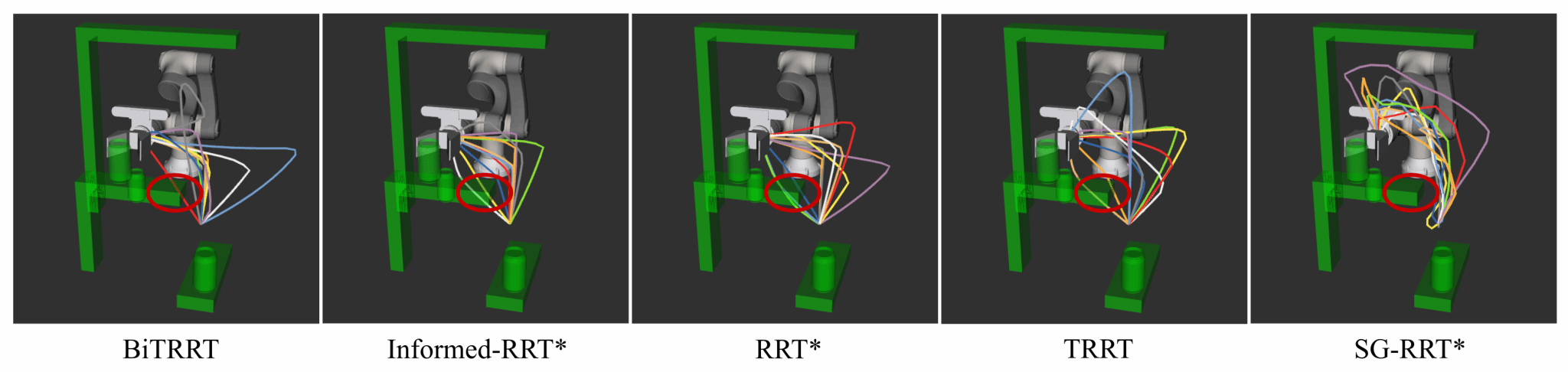
SG-RRT*在复杂障碍环境实现机械臂避障路径安全优化

