
李小毛
研究员,博导
无人艇工程研究院总工
联系方式:lixiaomao@shu.edu.cn
l 个人简介
李小毛,上海大学机自学院研究员、博士生导师,无人艇工程研究院总工。
从事计算机视觉研究,在目标检测、目标跟踪、三维重建、图像增强等方面取得系列成果:攻克了复杂条件下的目标检测和跟踪、稀疏特征的SLAM等关键技术,实现了无人艇平台的视觉目标检测和跟踪、无人艇平台的三维建图;主持及参与国家自然科学基金委重点项目、国家自然科学基金面上项目、科技部重点研发计划项目、海军武器装备预先研究项目、国家海洋局科研项目10项;发表高水平论文10余篇;获发明专利10余项;软件著作2项;获上海市技术发明一等奖2项,上海市技术发明二等奖1项,中国仪器仪表学会科学技术二等奖1项。
l 主要研究领域
1、基于视觉和点云的目标检测和跟踪
2、复杂成像条件下的图像增强
l 代表性成果
在《Pattern Recognition》、《Auton. Robots》、《中国科学》等国内外学术期刊发表SCI/EI论文10余篇、获授权发明专利10项,授权软件著作权2项。
▪ 论文
1、Bo Zhou, Yi He, Kun Qian, Xudong Ma, Xiaomao Li*: S4-SLAM: A real-time 3D LIDAR SLAM system for ground/watersurface multi-scene outdoor applications. Auton. Robots 45(1): 77-98 (2021)
2、Bajie Fan*,Xiaomao Li*,Yang Cong,Yandong Tang. Structured and weighted multi-task low rank tracker. Pattern Recognition. 2018, 81:528-544.
3、Shaorong Xie, Chang Liu, Jiantao Gao, Xiaomao Li, Jun Luo, Baojie Fan, Jiahong Chen, Huayan Pu, Yan Peng: Diverse receptive field network with context aggregation for fast object detection. J. Vis. Commun. Image Represent. 70: 102770 (2020)
▪ 获奖
获上海市技术发明一等奖2项
上海市技术发明二等奖1项
中国仪器仪表学会科学技术二等奖1项
▪ 知识产权
1、水面无人平台智能化智能控制软件,软件著作权,7997981,2021/3/7
2、基于侧扫声呐的自主水下文物疑点检测和识别软件,软件著作权,7997982,2021-0205
▪ 成果展示
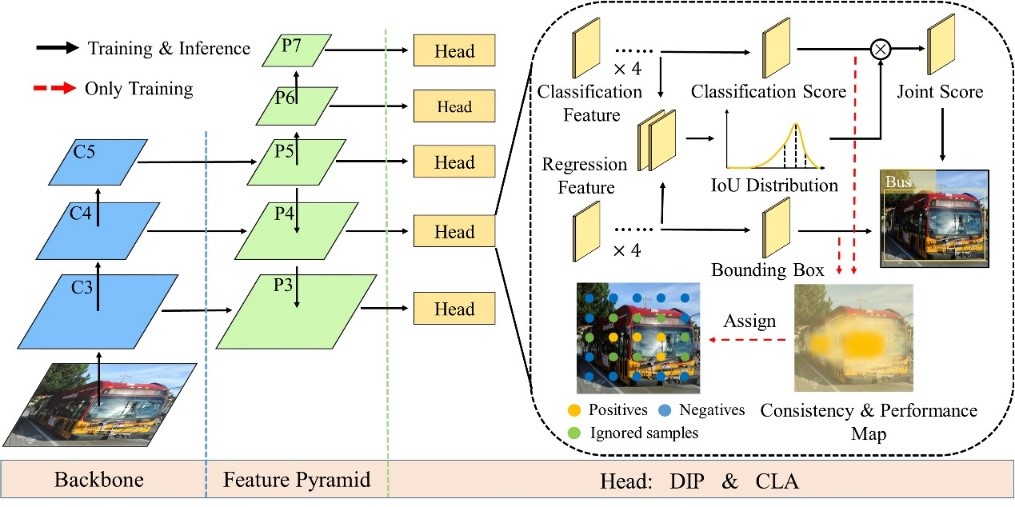
图1 CCDet网络以解决目标检测的定位和分类歧义性
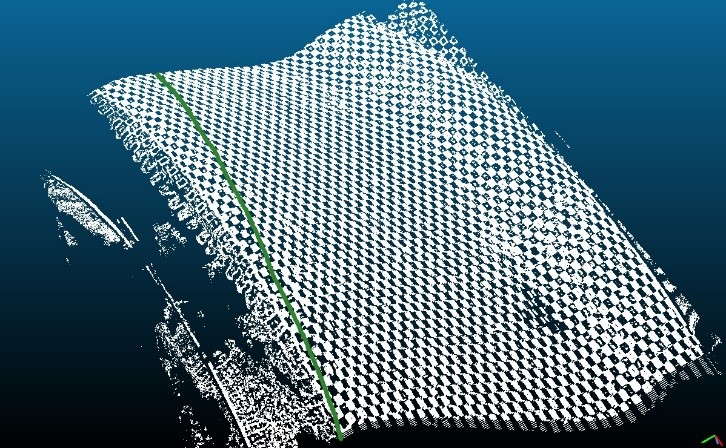
图2 基于点云的轮毂磨损测量(数据来源:北京清影机器视觉技术有限公司)
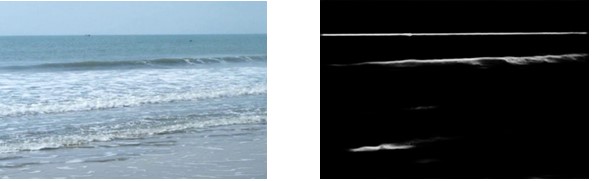
图3 基于视觉的波浪测量
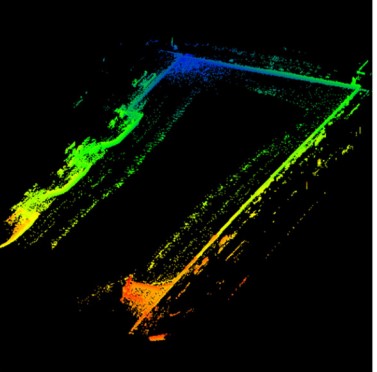
图4 港口地图重建
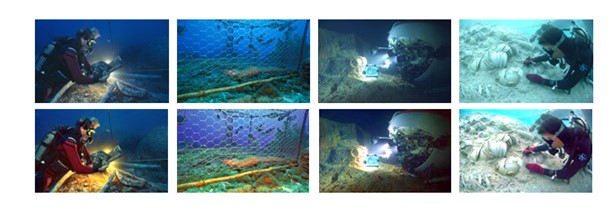
图5 水下图像增强
l 科研项目
1、科技部重点研发计划,2020YFC1521703,水下考古探测关键技术研发,2020.10-2024.1,245万(课题经费),在研,课题负责人;
2、校企长期合作,D.71-0109-21-005,视觉检测合作项目技术研究,2020.12--,年度经费24万,在研,主持;
3、国家自然科学基金委重点项目,U1613226,面向远洋的风力直驱水面无人船设计、控制与能源管理关键技术,2017.1-2020.12,78万(课题经费),已结题,课题负责人;
4、国家自然科学基金面上项目,61673254, 全域海面障碍检测研究,2017.01 – 2020.12,62万元,已结题,主持;
5、国家海洋局科研项目,D.71-0109-16-029,海岛在线监视系统及关键技术研究,2016.12 – 2017.12,已结题,主持;
6、国家海洋局科研项目,D.71-0109-15-163,海洋调查船搭载型水面无人智能测量工作平台,2014.10 - 2016.12,920万元,已结题,主持。

