 刘娜
刘娜
教授,博导
联系方式:liuna_sia@shu.edu.cn
● 个人简介
刘娜,上海大学机电工程与自动化学院教授,上海大学微纳操作技术研究中心副主任。主要研究兴趣包括面向生物医学应用的单细胞高通量操控、基于光场/磁场的微纳操作、胃肠道微型软体机器人的关键技术研究。以第一/通讯作者发表SCI论文30余篇,其中包括Nature Communications、Advance Science、 IEEE 汇刊 等中科院TOP期刊,申请/授权发明专利20余项,成果转化6项。主持国家自然科学基金面上、青年,上海市科委等国家/省部级级项目多项,获中国仪器仪表学会技术发明奖一等奖、上海市技术发明奖一等奖,上海市青年科技英才扬帆计划等学术奖励。
● 主要研究领域
1、单细胞高通量操控与信息图谱表征策略与装备;
2、生物兼容性软体机器人设计与控制;
3、生物信息多模态融合。
● 代表性成果
▪ 研究成果1: 生物兼容性软体机器人设计与控制研究
通过设计并优化磁化凝胶层间的磁力作用, 提出了一种多层磁性机器人的自组装方式;研究了磁场控制的黏附-脱离机制,提出了结合生物粘附机制的磁性机器人多靶点可控粘附转移机制,首次在活体猪胃内实现了多靶点粘附递送;相关成果发表在Nature Communications 等国际期刊上。
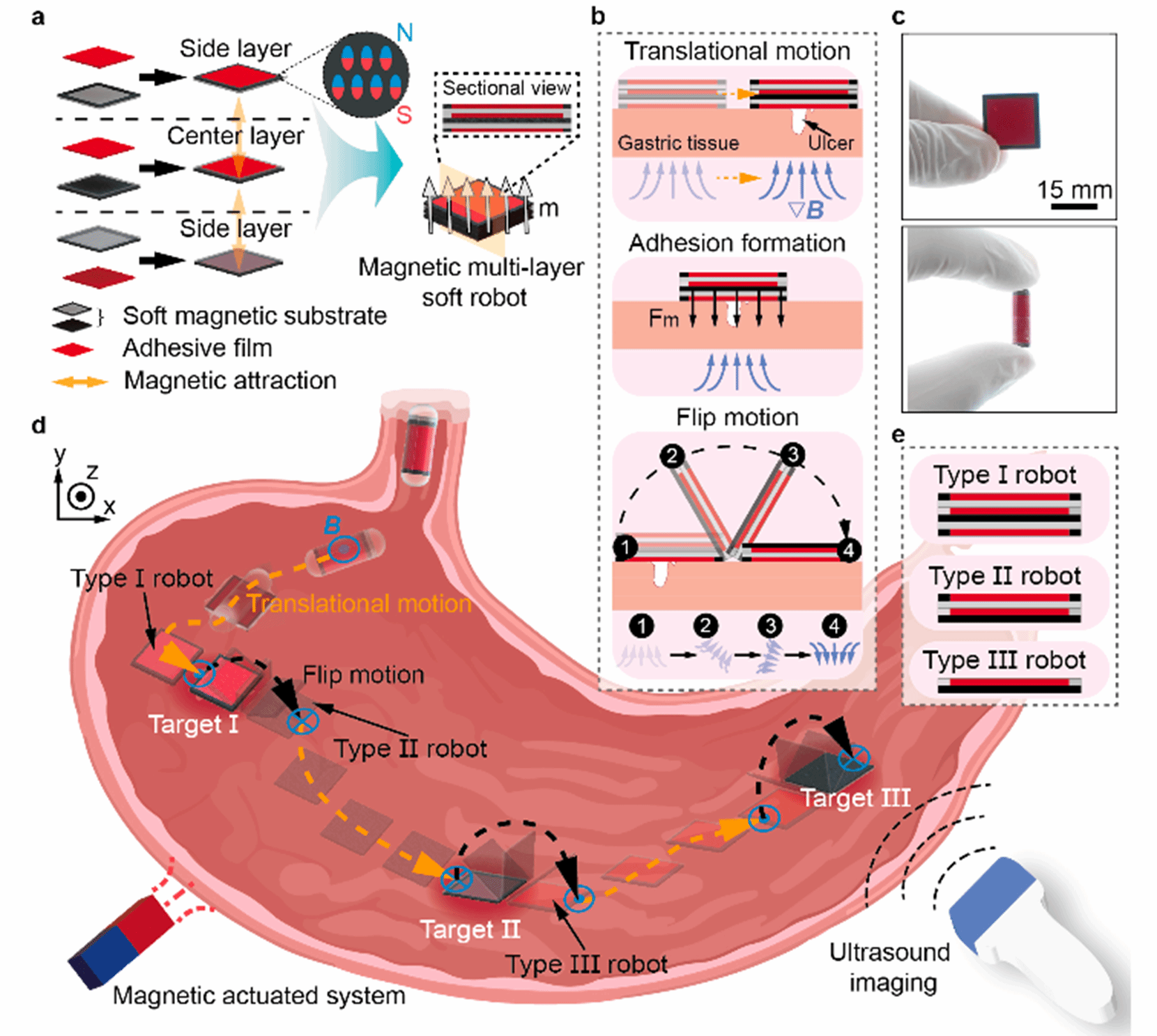
图1. 多层磁控软体机器人
研究成果2:单细胞高通量操控与表征策略及机器人装备研究
基于不同形态和种类细胞的介电泳力模型,提出并研究了基于光诱导操控机制的细胞筛选及参数控制方法,实现了临床脱落细胞样本中的癌细胞筛选收集;针对细胞机电特性检测依赖于不同的激励方式,难同步检测的问题,项目组基于微吸管操作机器人设计了截面梯度化的细胞捕获器件,建立了细胞电学和半空间吸附模型,提出了基于视觉反馈和电学阻抗谱激励的同步调控方法,基于微吸管捕获技术,实现了单细胞机电特性四个参数(粘滞系数、弹性模量、平衡模量、膜电容)同步获取。相关成果发表在IEEE Transactions on Automation Science and Engineering,IEEE Transactions on Biomedical Engineering等期刊。
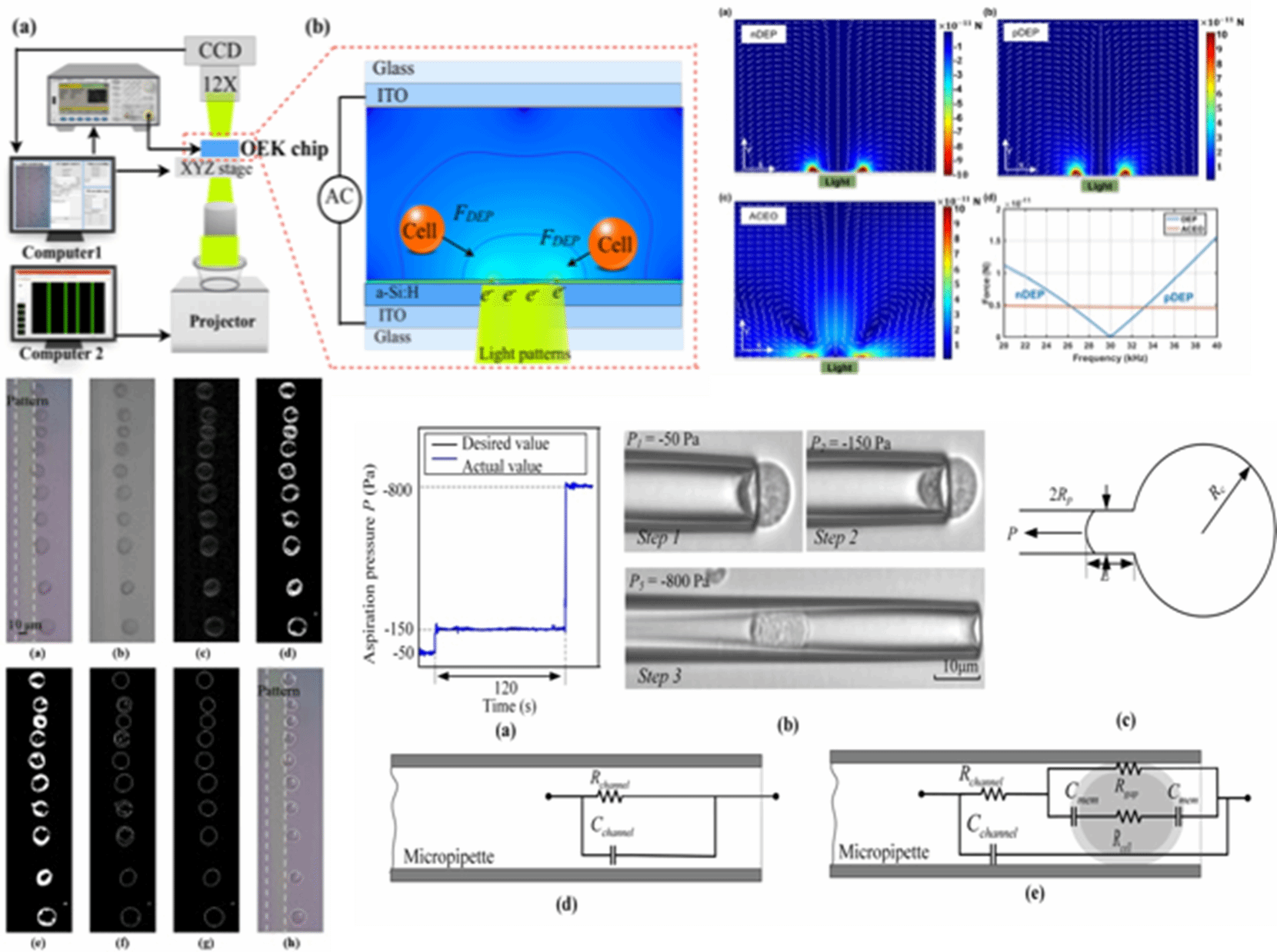
图2:单细胞并行操控与表征机器人装备
研究成果3: 基于可穿戴传感生物信息多模态融合检测
通过研究微纳仿生制造工艺,研究了基于压电、电容式等原理的高性能柔性可穿戴传感器,实现了手指和下肢肌电信号和肌肉收缩图谱信号的高灵敏度检测,结合机器学习算法,实现了多种行为动作的识别,相关成果发表在Advance Science等期刊和国际上。
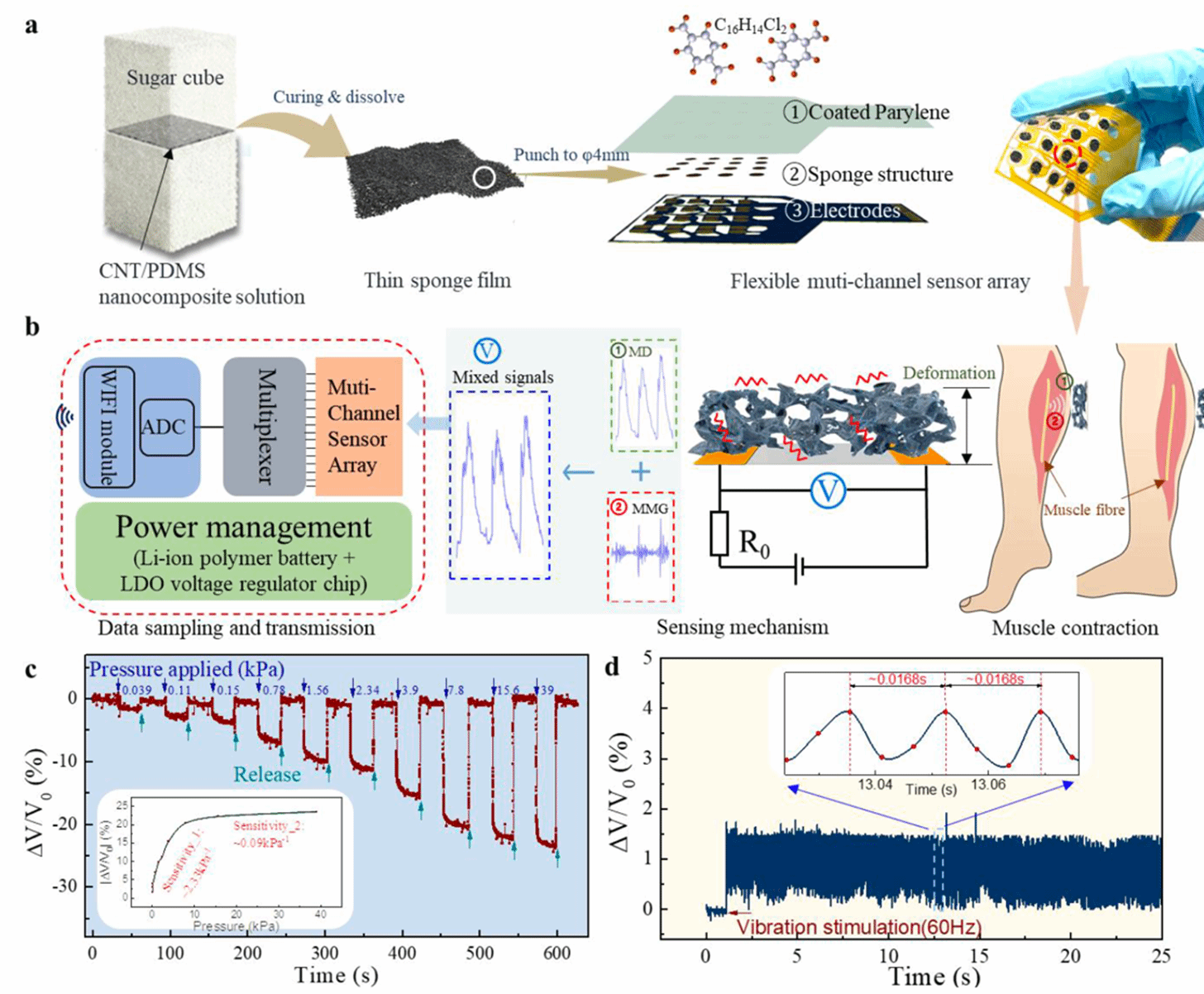
图3. 可穿戴柔性传感器
更多论文列表:https://scholar.google.com/citations?user=fphQVf4AAAAJ&hl=zh-CN
▪ 获奖
获上海大学 “优秀党务工作者”(2021)、上海大学机电工程与自动化学院优秀党务工作者(2020),指导研究生作为负责人获 “互联网+”上海市金奖(2023)
▪ 知识产权 (部分)
1.刘娜 张敏 蒲华燕 杨扬 孙翊 罗均 刘媛媛 谢少荣,一种单细胞生物物理特性实时检测方法,授权号:ZL 2017 11000294.8 授权日:2019-08-30
2.刘娜 林雁宾 蒲华燕 杨扬 罗均 谢少荣 彭艳 刘媛媛 孙翊. 一种细胞划痕芯片、装置及方法,授权号:ZL 201711419130.9 授权日:2019-06-21
3. 杨扬 俞嘉升 蒲华燕 刘娜 刘媛媛 罗均 彭艳 谢少荣 孙翊. 一种细胞多生物物理特性的检测装置及方法,授权号:ZL 201711403788.0 授权日:2019-06-18
4.蒲华燕、孔祯、孙翊、汪小帆、彭艳、罗均、杨毅、谢少荣、刘娜,一种交错可变电极巨电流变液阻尼器,授权号: ZL201810367140.0, 授权日:2019-08-09
5. 蒲华燕、元书近、孙翊、罗均、杨扬、刘媛媛、刘娜、谢少荣、彭艳、姜伟、陈学东,一种单自由度减振装置测试平台,授权号: ZL201810026607.5,授权日:2019-12-03
6. 蒲华燕、谢荣庆、孙翊、罗均、谢少荣、张泉、彭艳、杨扬、刘娜,一种采用多层挤压式磁弹簧和摆杆的准零刚度隔振器,授权号:ZL201810004480.7,授权日:2019-07-16
7.刘娜 杜盼盼 蒲华燕 杨杨 罗均 谢少荣 刘媛媛 杨毅 孙翊,基于细胞形变量和声表面波的癌细胞分离装置及控制系统 ,申请号: 201810853141.6
8.刘娜 赵秋红 杜盼盼 刘媛媛 岳涛 蒲华燕 彭艳 罗均一种癌细胞分类系统及方法, 申请号:20191054030.2,专利号: ZL201910540309.2
9. 刘娜 陈子衡 袁慧宇 张丹 张珂维岳涛 刘媛媛 彭艳, 一种磁性敷料及其制备方法和应用,专利:ZL202111079086.8,申请日:2021-09-15
10.刘娜 刘威 岳涛 刘媛媛 兰伟霞 彭艳 蒲华燕 谢少荣 罗均, 一种复合柔性传感器及其制备方法, ZL 202110652589.3,申请日:2021-06-11
11.刘娜 张天媛 岳涛 刘媛媛 兰伟霞 彭艳,一种粘弹性材料特性确定方法及系统,ZL2202210164899.5, 申请日:2022-02-23
● 科研项目
1.国自然基金面上项目,基于双层液滴制备及光诱导操控机制研究的DEL高通量功能性筛选方法(62473245),2025/01-2028/12
2.国家自然科学基金重点项目,基于微纳米机器人技术的细胞并行操控及多维物理信息检测研究(61933008),2020/01-2024/12
3.国家自然科学基金青年基金, 细胞行为调控与同步表征的光诱导操作方法研究,2018/01-2020/12
4.国家自然科学基金面上项目,基于微纳机器人技术的细胞多维物理体征图谱监测及炎症因子作用机制研究,62073208,2021/01-2024/12
5.上海市青年科技英才扬帆计划,17YF1406100,细胞构形调控与物性检测的一体化操控方法研究, 2017.05-2020.04
6.上海市经信委, XXX自主布防回收技术研究, 2017.07-2019.12
7.辽宁省科学技术计划重点实验室开放课题,基于微纳米机器人技术的细胞多维物理信息并行检测方法及其膀胱癌诊断应用研究,2020.05-2020.05


扫一扫
版权所有 © 上海大学 沪ICP备09014157 沪公网安备31009102000049号 地址:上海市宝山区上大路99号 邮编:200444 电话查询
技术支持:上海大学信息化工作办公室 联系我们