 钟宋义
钟宋义
副教授,硕导
联系方式:zhongsongyi@shu.edu.cn
l 个人简介
钟宋义,上海大学机自学院副教授、硕士生导师。
从事结构功能一体化智能器件设计与制造、软体机器人柔性传感与控制、无人艇自主对接等技术研究,在多功能柔性传感结构设计、软体驱动器姿态控制等方面取得系列成果:攻克了多材料柔性传感器制造、软体驱动器状态感知预测等多项关键技术,实现了柔性传感器快速制备、软体机器人姿态精准感知与控制,可用于无人艇自主对接、;主持及参与中央军委XX部项目、国家自然科学基金委青年基金、科技部重点研发计划课题、上海市创新行动计划等项目11项;发表高水平论文10余篇;申请/授权发明专利20项。
l 主要研究领域
1、软体机器人柔性传感
2、结构功能一体化器件3D打印
3、无人艇自主对接控制
l 代表性成果
在《International Journal of Machine Tools and Manufacture》、《Journal of Materials Processing Technology》等国内外学术期刊发表SCI/EI论文10余篇、获授权发明专利10项。。
▪ 论文
1、Zhong S, Gai Z, Yang Y, et al. A contraction length feedback method for the McKibben pneumatic artificial muscle[J]. Sensors and Actuators A: Physical. 2022, 334: 113321.
2、Zhong S, Qi L, Xiong W, et al. Research on mechanism of generating aluminum droplets smaller than the nozzle diameter by pneumatic drop-on-demand technology[J]. The International Journal of Advanced Manufacturing Technology. 2017, 93(5): 1771-1780.
3、Qi L, Zhong S, Luo J, et al. Quantitative characterization and influence of parameters on surface topography in metal micro-droplet deposition manufacture[J]. International Journal of Machine Tools and Manufacture. 2015, 88: 206-213.
4、Zhong S, Qi L, Luo J, et al. Effect of process parameters on copper droplet ejecting by pneumatic drop-on-demand technology[J]. Journal of Materials Processing Technology. 2014, 214(12): 3089-3097.
▪ 获奖
获2019年度陕西省高等学校科学技术一等奖
获2018年陕西省优秀博士学位论文
▪ 知识产权
1、钟宋义、盖子仪等,一种具有单向自锁功能的无人艇回收缩距装置,ZL202010729478.3;
2、钟宋义、秦亚文等,一种机械腕的配平结构及配平方法,ZL202010202149.3;
▪ 成果展示
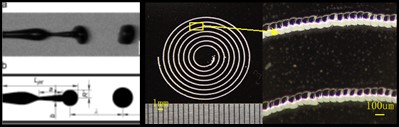
图1 多材料微滴喷射与功能器件3D打印

图2 气动人工肌肉柔性传感器
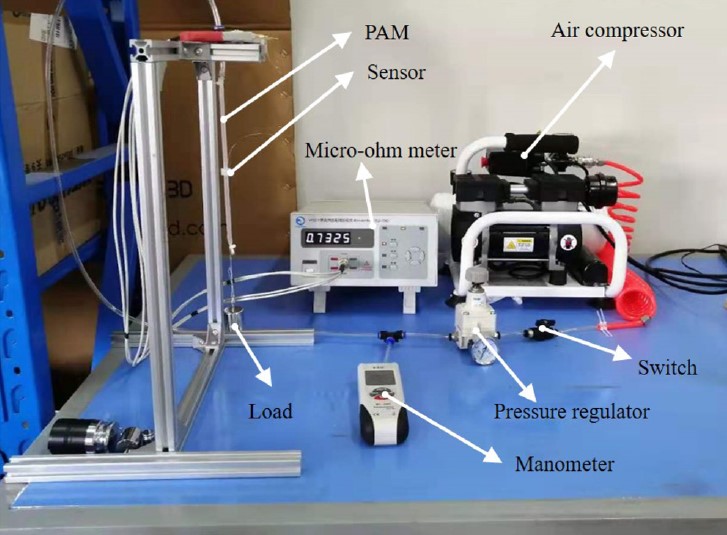
图3 软体驱动器传感测试控制系统
l 科研项目
1、国家自然科学青年基金项目:软体机器人自感知执行器复合打印成形机理及控制研究,2022.01-2024.12,30万元,在研,主持;
2、中央军委联合参谋部国家级纵向项目:基于温盐XXXX背景场开发,2019.11-2020.12,155万元,结题,主持;
3、上海市科技创新行动计划课题:南极无人观测站智能巡检机器人关键技术研究,2020.08-2023.08,30万元,在研,主持;
4、国家自然科学基金委重点项目:水下机器人故障预测与容错控制研究,2021.01-2025.12,302万元,在研,参与;
5、国家自然科学基金面上项目:压电导电复合生物人工骨的3D打印综合成形及其物化微环境主动调控机理与方法,2020.01-2023.12,58万元,在研,参与。

