宋薇
副研究员
联系方式:song_wei@shu.edu.cn
l 个人简介
宋薇,上海大学机自学院副研究员、硕士生导师,上海市浦江学者。
从事机器人智能感知与控制、精密测量与定位、仿生视觉等领域的研究,在目标识别与位姿测量、视觉反馈控制、视觉SLAM、机器人群组协作、高功率激光束靶耦合定位等方面取得系列成果,主持及参与国家自然科学基金项目、国家大科学工程项目“神光Ⅱ”装置升级工程项目等;发表SCI、EI论文30余篇。
l 主要研究领域
1、机器人智能感知与控制技术(包括基于深度学习的物体识别与场景分析、移动机器人SLAM技术、群组协作技术等)
2、精密测量与定位技术(包括激光核聚变束靶耦合精密定位技术、基于CAD模型的位姿检测与对接装配等)
3、仿生视觉(基于场景分析和意图导向的主动视角控制、人形机器人头眼协调控制等)
l 代表性成果
▪ 论文
1、Wei Song, Li Zhang, An RGB-D SLAM algorithm based on adaptive semantic segmentation in dynamic environment, Journal of Real-Time Image Processing, Volume 20, Issue 5, October 2023.
2、陈赵杰,周扬,宋薇. CAD立体模型多源匹配的ICF靶位姿测量,光学精密工程, 2023,31(14):2040-2051
3、一种多模块神经网络与遗传算法相结合的工件单目位姿估计方法,陈钧,宋薇,机器人, 2023,45(02):187-196.
4、动态场景下基于自适应语义分割的RGB-D SLAM算法,王梦瑶,宋薇,机器人, 2023,45(01):16-27.
5、一种基于近场子集划分的多机器人任务分配算法,宋薇,高原,沈林勇,章亚男,机器人, 2021,43(05),629-640
6、面向工业零件的机器人单目立体匹配与抓取, 宋薇,仇楠楠,沈林勇,章亚男,机器人, 2018.11.4, 40(6): 950~957
7、基于3CCD显微视觉的高精度靶位姿控制光学,宋薇,宋志杰,章亚男, 沈林勇,光学 精密工程, 2018.7.12, 26(7): 1794~1801
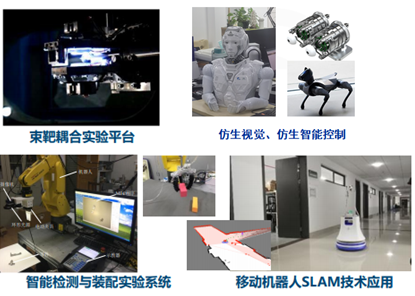
▪ 成果展示
l 科研项目(选取代表性项目,没有可不填)
1、国家自然科学基金课题:Raw-Image微小物体高精度位姿测量,2012.1 – 2014.12,主持;
2、上海市浦江人才计划项目:基于原始图像建模法的ICF靶定位研究,2011.10- 2013.9,主持;
3、国家大科学工程“神光II装置升级工程靶场系统”相关横向项目:CCRS靶场多路视频监视测量系统,2018.3-2022.8,主持;
4、企业横向项目:“基于仿生视觉的主动SLAM系统开发”,2024.1-2026.12,主持;
l 国际合作(没有可不填)
1、与日本冈山大学保持紧密合作。

