 忽伟
忽伟
讲师,硕导
联系方式:sjtuweihu@shu.edu.cn
l 个人简介
忽伟,上海大学机电工程与自动化学院,讲师、硕士生导师。2023年加入上海大学。上海市青年科技英才扬帆计划获得者。博士毕业于上海交通大学机械系统与振动国家重点实验室,振动、冲击、噪声研究所。曾担任中国航天科技集团第八研究院卫星型号研制工程师。
从事空间柔性结构展开回收控制/振动主动控制、航天器微振动控制等研究,在空间柔性太阳翼超低频振动控制、卫星平台振源-路径-载荷超宽频微振动控制方面取得系列成果:攻克了电-磁-热-力多物理场耦合作动器设计、轻量化-低功耗-超带宽隔振多目标精确优化设计等关键技术,突破了空间结构减振快速、同步、精确调控难题。在Mechanical Systems and Signal Processing、Sensors and Actuators A: Physical等期刊发表高水平论文10余篇。目前,作为项目负责人,主持国家级项目1项,省部级项目3项;包括:国家自然科学基金青年基金项目(国家级)、中国博士后科学基金面上项目(省部级)、上海市青年科技英才扬帆计划项目(省部级)、航天五院502所空间智能控制技术国家重点实验室项目(军工省部级)、航空航天结构力学及控制国家重点实验室开放课题、上海大学青年英才起航计划。
l 主要研究领域
1、空间“大、柔、轻”可展开结构精密驱动控制、超低频振动控制
2、空间可组装卫星平台“振源-路径-载荷”超宽频微振动控制
l 代表性成果
在《Mechanical Systems and Signal Processing》、《Sensors and Actuators A: Physical》等期刊发表SCI论文10余篇。
1、第一作者. Semi-active vibration control of two flexible plates using innovative joint mechanism [J]. Mechanical Systems and Signal Processing, 2019, 130:565–584.
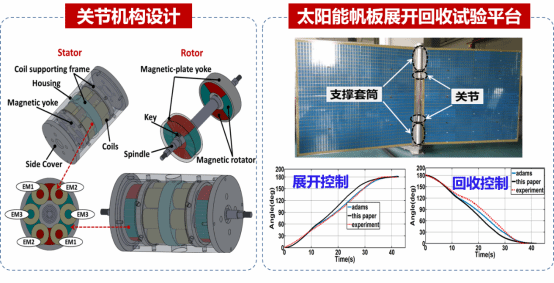
2、第一作者. Design of an innovative active hinge for self-deploying/folding and vibration control of solar panels [J]. Sensors and Actuators A: Physical, 2018, 281:196–208.
3、第一作者. Semi-active vibration control of a rotating flexible plate using stiffness and damping actively tunable joint [J]. Journal of Vibration and Control, 2019, 25(21-22):2819–2833.
4、第一作者. Low-frequency vibration control of two flexible appendages using a joint with actively tunable stiffness [J]. Journal of Vibration and Control, 2023, 29(15-16): 3621-3633.
▪ 知识产权
1、发明专利:一种液电混合式主被动一体化宽频隔振装置.中国,CN202211717198.6(已授权)
2、发明专利:多自由度的工件表面柔性加工装置及方法. 中国,CN201711218589.2 (已授权)
3、发明专利:基于液电混合作动器的空间柔性桁架振动控制实验系统. 中国, CN202211677713.2(已公开)
4、发明专利: 一种用于空间飞行器低频振动测试的微重力试验系统. 中国, CN2024118181700(已受理)
▪ 成果展示
1、研制了关节原理样机,搭建了太阳能帆板微重力试验平台,实现了太阳能帆板的平稳展开/回收。
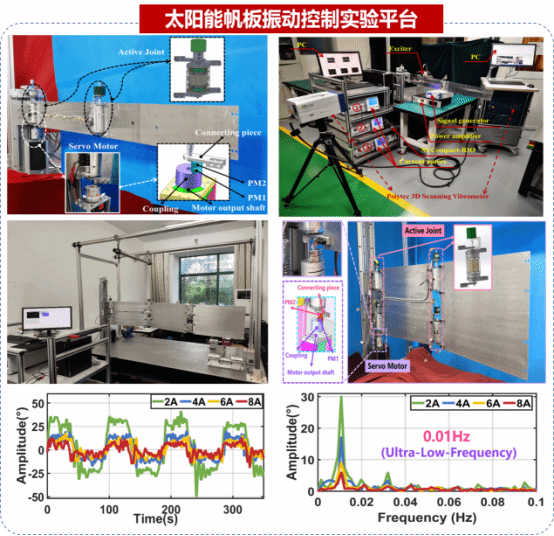
2、提出关节磁控变刚度、变阻尼半主动振动控制方法,搭建了太阳能帆板地面缩比试验平台,实现了多源激励下太阳能帆板0.01Hz超低频振动控制。
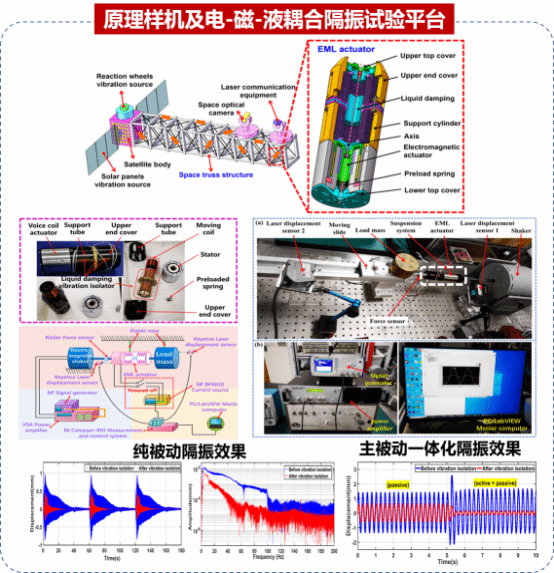
3、提出电-磁-液多场耦合驱动技术,采用电磁执行器进行低频主动隔振,采用液体阻尼进行中高频被动隔振,两者串行连接,实现主被动一体化低、中、高频超宽频微振动控制。
4、提出多稳态超结构、压电分流阵列、非线性电磁刚度和电磁阻尼、定位隔振一体化技术,解决多振源-多路径-多载荷超宽频微振动复合控制问题,实现0.01~200Hz超宽频段内载荷安装界面振动加速度低于0.1mg。

l 科研项目
1、国家自然科学基金青年基金项目:含磁控关节的柔性太阳翼低频振动主动控制,2023.01-2025.12,30万,主持
2、中国博士后科学基金面上项目:铰接柔性太阳翼-新型关节机构耦合系统动力学分析与振动控制,2021.05-2023.01,8万,主持
3、上海市青年科技英才扬帆计划项目,基于液电混合作动器的空间柔性附件振动控制研究;2020.07-2023.06,20万,主持
4、航天五院502所空间智能控制技术国家重点实验室,国防科工局稳定支持科研项目,XXXXX,2024.01-2025.12,20万,主持
5、航空航天结构力学及控制国家重点实验室开放基金项目,含磁控关节的柔性太阳翼力-电-磁耦合振动机理及低频半主动振动控制,2024.01-2025.12,5万,主持
6、上海大学青年英才起航计划,2024.01-2026.12,30万,主持
7、国家重点研发计划,复杂柔性可组装结构动力学及姿态与微振动控制,2022.12-2026.11,500万,参与(技术骨干)

