
李禄权
讲师,硕导
联系方式:lqli@shu.edu.cn 18813094185
l 个人简介
李禄权,上海大学机自学院讲师、 硕生导师。
从事机器人机构学研究,围绕广义单环并联机构的自由度配置、驱动单元集成与运动性能优化等关键问题,提出了系统化的多自由度驱动单元设计方法及广义单环并联机构构型综合理论,实现了机构结构简化与有效自由度重构,显著提升了并联机器人综合运动性能,拓展并联机构在足式机器人、分拣机器人及微创手术机器人等领域的应用;主持中国博士后科学基金面上项目1项,中央高校基本科研业务费项目1项,参与国家自然科学基金面上项目3项;发表高水平论文20篇;获发明专利1项。
l 主要研究领域
1、机器人机构学
2、多模式移动机器人
3、四足及人形机器人
l 代表性成果
在《Mechanism and Machine Theory》、《Chinese Journal of Mechanical Engineering》、《Robotica》等国内外学术期刊发表SCI/EI论文20余篇、获授权发明专利1项。
▪ 论文
1、 Li L, Fang Y, Guo S, et al. Type synthesis of a class of novel 3-DOF single-loop parallel leg mechanisms for walking robots [J]. Mechanism and Machine Theory, 2020, 145: 103695. (SCI, TOP一区)
2、 Li L, Fang Y, Wang L. Design of a family of multi-DOF drive systems for fewer limb parallel mechanisms [J]. Mechanism and Machine Theory, 2020, 148: 103802. (SCI, TOP一区)
3、 Li L, Fang Y, Wang L. Type synthesis of single-loop 3T1R-parallel mechanisms with a multi-DOF drive system [J]. Mechanism and Machine Theory, 2021, 163: 104373. (SCI, TOP一区)
4、 Li L, Fang Y, Yao J, et al. Type synthesis of a family of novel parallel leg mechanisms driven by a 3-DOF drive system [J]. Mechanism and Machine Theory, 2022, 167: 104572. (SCI, TOP一区)
5、 Li L, Zhang D, Tian C. A family of generalized single-loop RCM parallel mechanisms: structure synthesis, kinematic model, and case study [J]. Mechanism and Machine Theory, 2024, 195: 105606. (SCI, TOP一区)
6、 Li L, Fang Y, Yao J, et al. Design and Analysis of a Novel Schönflies Motion Parallel Robot with Full Cycle Rotation [J]. Chinese Journal of Mechanical Engineering, 2024, 27: 160. (SCI, 二区)
7、 Li L, Tian C, et al. Optimal design of a generalized single-loop parallel manipulator with RCM characteristic considering motion/force transmissibility [J]. Robotica, 2025, 1-17. (SCI, 四区)
8、 Li L, TIAN C, XIA Z, et al. Type synthesis of a class of parallel RCM manipulators based on concentric spherical surfaces geometric model [J]. Mechanism and Machine Theory, 2025, 209:106011.
▪ 知识产权
1、李禄权,方跃法, 孙天宇,王林。一种四足步行机器人[P]. 发明专利,专利号: 202110037327.6. (专利)
▪ 著作
▪ 成果展示
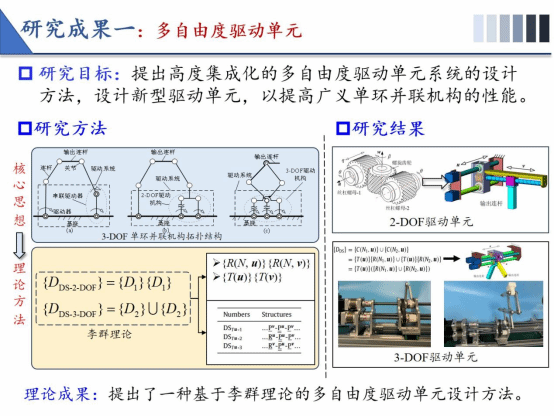
图1 集成化多自由度驱动单元设计理论
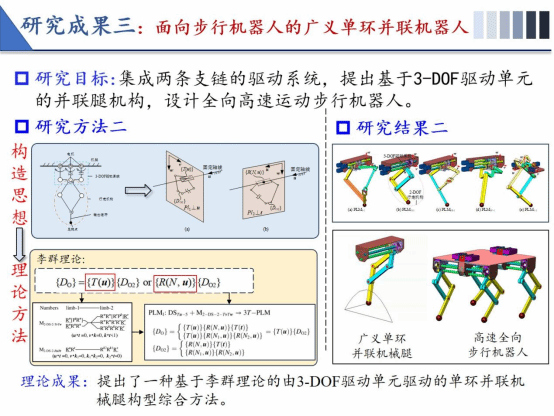
图2:面向步行机器人的广义单环并联机器人
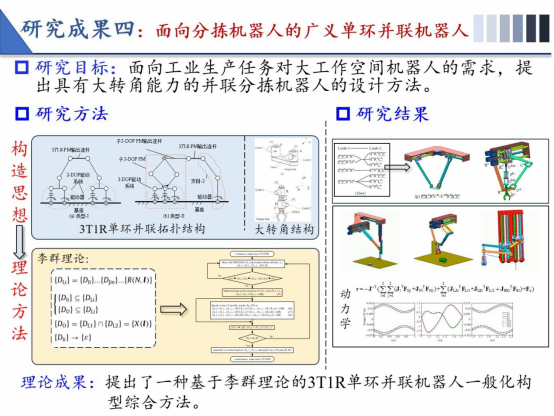
图3:面向分拣机器人的广义单环并联机器人
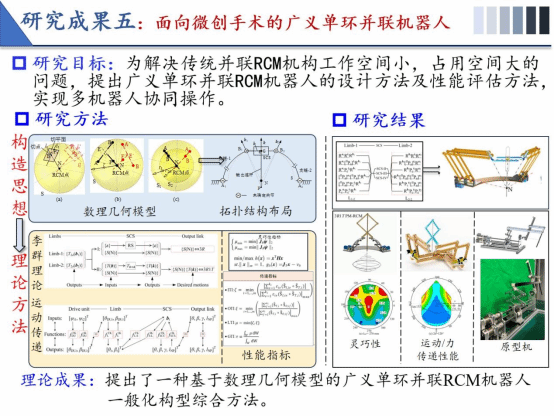
图4:面向微创手术的广义单环并联机器人
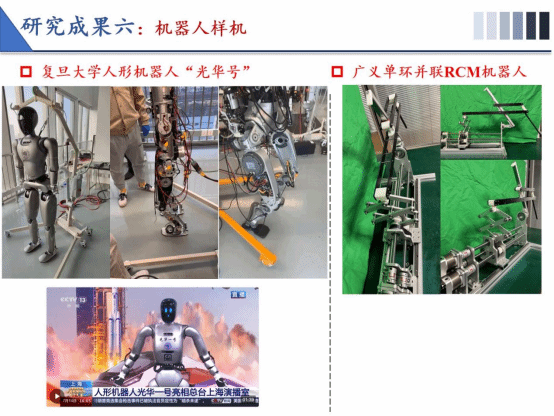
图5:人形及微创手术机器人样机
l 科研项目
1、中国博士后科学基金“面上”项目:广义单环并联RCM机构设计理论与性能优化研究,2023.09-2025.03,主持;

