
|
吴璠 副教授 联系方式:wufan@shu.edu.cn
|
吴璠,上海大学机自学院副教授。2020年于伦敦国王学院获博士学位,后于慕尼黑工业大学从事博士后工作,作为技术骨干和课题负责人参与多项欧盟和德国科研项目(参与项目总经费约九千万欧元)。在巴伐利亚高科技计划资助的智能工厂项目中(1300万欧元),负责领导群体学习(Collective Learning)团队,打造了首个大规模双臂机器人实验和数据采集集群,达50台规模。吴博士主要从事机器人执行器、机械臂运动控制、最优控制和强化学习、任务规划、具身智能等研究,关注其在智能工厂和柔性制造场景的应用;获评上海市高层次人才;在T-RO,T-ASE,RAM,RA-L等机器人领域核心期刊和ICRA,IROS等顶会发表高水平论文30余篇。
1、机器人与机器智能
2、智能工厂与柔性装配
▪ 论文
1、Fan Wu*, Matthew Howard, Energy Regenerative Damping in Variable Impedance Actuators for Long-Term Robotic Deployment, IEEE Transactions on Robotics, 2020.
2、Yansong Wu, Zongxie Chen, Fan Wu*, Lingyun Chen, Liding Zhang, Zhenshan Bing, Abdalla Swikir, Alois Knoll, Sami Haddadin, TacDiffusion: Force-domain Diffusion Policy for Precise Tactile Manipulation, IEEE International Conference on Robotics and Automation (ICRA), 2025
3、Jicong Ao, Fan Wu*, Yansong Wu, Abdalla Swikir, Sami Haddadin, LLM-as-BT-Planner: Leveraging LLMs for Behavior Tree Generation in Robot Task Planning, IEEE International Conference on Robotics and Automation (ICRA), 2025
▪ 著作
Sami Haddadin, Hamid Sadeghian, Sandra Hirche, Gerhard P. Fettweis, Giang T. Nguyen, Yushan Yang, Fan Wu, et al., Networked Collaborative Robots Enabled by 6G, Book Chapter in 6G-life: Unveiling the Future of Technological Sovereignty, Sustainability and Trustworthiness, published by Academic Press, 2025.
▪ 成果展示

Figure 1 群体学习系统
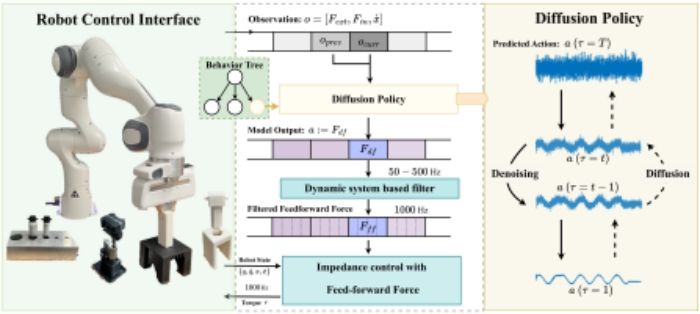
Figure 2 TacDiffusion:基于扩散策略模仿学习力控操作策略
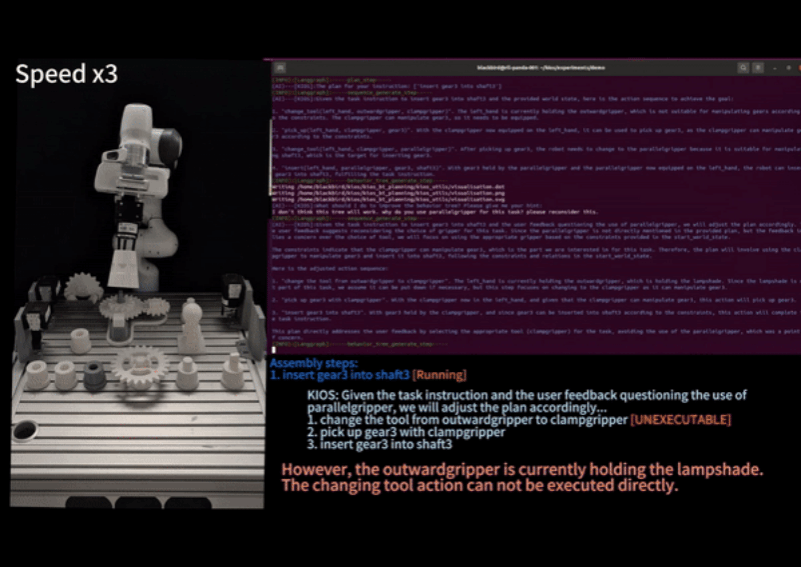
Figure 3 LLM-as-BT-planner: 基于大语言模型的行为树生成,用于装配操作规划

Figure 4 基于Unified Force-Impedance Control的机械臂控制,用于机器人打磨曲面
与慕尼黑工业大学、伦敦国王学院保持紧密合作。

