窗体顶端

| 王洁羽 副教授,硕导 联系方式:jywang2021@shu.edu.cn
|
l 个人简介
王洁羽,上海大学机自学院副教授,硕士生导师。英国赫瑞瓦特大学博士,加拿大多伦多大都会大学博士后,北京航空航天大学卓越百人博士后。主持国家自然科学基金青年基金项目、中国博士后基金面上项目、高端外专计划等;参与一项国家重点研发计划子课题。在中科院一区期刊及美国机械工程师协会会刊《Mechanism and Machine Theory》、《ASME-Journal of Mechanism and Robotics》、《ASME-Journal of Mechanical Design》等学术期刊发表SCI/EI论文40余篇;授权发明专利十余项。担任机器人与机构学重要学术会议ASME-IDETC-MR及IEEE-ReMAR的副主编,中科院一区期刊MMT在内的10余个期刊审稿人。
l 主要研究领域
1、变体飞行器机构
2、仿生机器人机构
l 代表性成果
▪ 论文
1. Zhao, Y., Xi, F., Hao, G., Tian, Y., Li, L., Wang, J.*, 2024. Kineto-static analysis of a hybrid manipulator consisting of rigid and flexible limbs with locking function for planar shape morphing, Mechanism and Machine Theory, 203, p. 105802.
2. Tian, Y., Zhu, Y., Zhao, Y., Li, L., Li, Y., Wang, J.* and Xi, F., 2024. Optimal design and analysis of a deformable mechanism for a redundantly driven variable swept wing. Aerospace Science and Technology, 146, p. 108993.
3. Wang, J. and Xi, F., 2022. Robotic Fish Scales Driven by a Skin Muscle Mechanism, Mechanism and Machine Theory, 172, p. 104797.
4. Wang, J., Kong, X. and Yu, J., 2022. Design of deployable mechanisms based on Wren parallel mechanism units, Transactions of the ASME, Journal of Mechanical Design, 144(6), p. 063302.
5. Xi, F., Zhao, Y., Wang, J.*, Tian, Y., and Wang, W., 2021. Two actuation methods for a complete morphing system composed of a VGTM and a compliant parallel mechanism, Transactions of the ASME, Journal of Mechanisms and Robotics, 13(2), p. 021020.
6. Wang, J., Zhao, Y., Xi, F. and Tian, Y., 2020. Design and analysis of a configuration-based lengthwise morphing structure. Mechanism and Machine Theory, 147, p. 103767.
7. Wang, J. and Kong, X., 2019. A geometric approach to the static balancing of mechanisms constructed using spherical kinematic chain units. Mechanism and Machine Theory, 140, pp. 305-320.
8. Wang, J. and Kong, X., 2019. A novel method for constructing multimode deployable polyhedron mechanisms using symmetric spatial compositional units. Transactions of the ASME, Journal of Mechanisms and Robotics, 11(2), p. 020907.
9. Wang, J. and Kong, X., 2018. Deployable polyhedron mechanisms constructed by connecting spatial single-loop linkages of different types and/or in different sizes using S joints. Mechanism and Machine Theory, 124, pp. 211-225.
10. Wang, J. and Kong, X., 2018. Deployable mechanisms constructed by connecting orthogonal Bricard linkages, 8R or 10R single-loop linkages using S joints. Mechanism and Machine Theory, 120, pp. 178-191.
▪ 获奖
1. The 17th International Conference on Intelligent Robotics and Applications最佳论文提名奖
2. 英国赫瑞瓦特大学研究成果奖
3. IFToMM(国际机构学与机器科学联合会)年轻代表项目奖学金
4. ASME(美国机械工程师协会)机构与机器人学生竞赛决赛前五
▪ 知识产权
1. 一种航空涡轮发动机
2. 一种基于鼠妇外形的可变形移动机器人
3. 一种滚动式变形移动机器人
4. 一种可变形三棱柱机器人
5. 双模式16杆滚动机构
6. 双模式移动机构
7. 六自由度滚动机构
8. 具有多姿态平台的折叠机构
9. 空间变形折叠机构
10. 十二自由度四面体机器人
▪ 成果展示
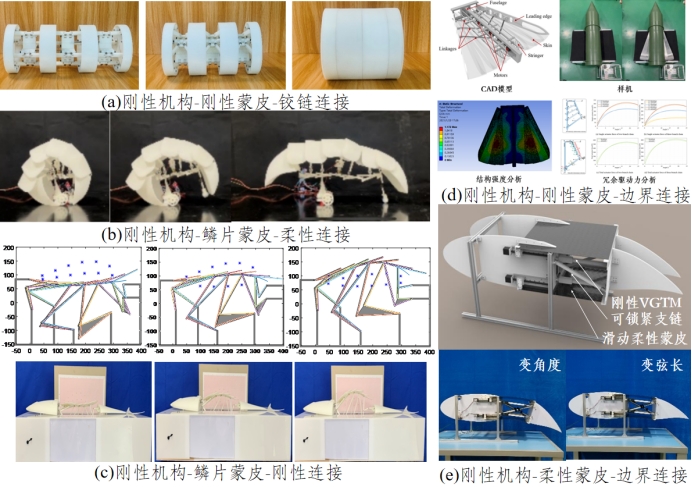
变形机翼机构及仿生机器人机构
l 科研项目
1、国家重点研发计划子课题:IGBT功率半导体模块动静态测试关键技术研究及装备研制,2024.11-2027.11,参与;
2、国家自然科学基金青年基金:高刚度轮廓连续变形机构的创新设计研究,2022.01-2024.12,主持;
3、中国博士后基金面上项目:基于少自由度并联机构的变形机翼的设计与分析,2019.11-2021.12,主持。
l 国际合作
与英国赫瑞瓦特大学、爱尔兰科克大学、加拿大多伦多大都会大学和法国国家研究中心机器人研究所保持紧密合作。

